本页导航
广告链接
液压伺服系统的基本特性
液压伺服系统的基本特性
|
液压伺服系统的基本特性 |
||
|---|---|---|
|
所谓基本特性是将远高于执行机构及负载环节的其他环节(如检测环节、伺服放大器、伺服阀)看成比例环节后的系统特性 |
||
|
系统 名称 |
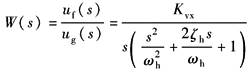
液压位置伺服系统 |
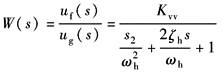
液压速度伺服系统 |
|
输出量 |
位移xp |
速度υp |
|
方块图 |
|
|
|
开环传 递函数 |
|
|
|
开环 增益 |
Kvx=KiKsvKfx/Ap |
Kvv=KiKsvKfv/Ap |
|
系统 类型 |
I型系统 |
O型系统 |
|
稳态 误差 |
阶跃输入ug(t)=R时,e(∞)=0 斜坡输入ug(t)=Rt时,e(∞)=R/Kvx 负载扰动引起的稳态位置误差 |
阶跃输入ug(t)=R时, 斜坡输入ug(t)=Rt时,e(∞)=∞ 负载扰动时, |
|
稳定性 |
系统稳定性易保证,简单的稳态性判据:Kvx≤2ζhωh 通常ζhmin=0.1~0.2 |
仅当开环增益很小时,才有可能稳定。为使系统能稳定地工作,务必加PI调节器进行系统校正 |
|
动态响 应估计 |
交轴频率ωc=Kvx 系统频宽ωb:ωc<ωb<ωh |
加PI校正后,ω'c=K'vv=KpKvv Kp为PI调节器的比例增益 系统频宽ωb:ω'c<ωb<ωh |