校正方式和常用的校正装置
校正方式和常用的校正装置
校正方式
|
校正方式 |
|---|
|
当控制系统不能通过调整自身的结构参数来改善系统的品质时,就需要在原系统中引入附加装置来改善系统的性能,这种改善系统性能的方法称为系统的校正(或补偿),所引入的附加装置称为校正装置 校正装置附加在系统中的形式有两种: 串联校正——校正装置Gc(s)与原系统的前向通路元件相串联,如图a所示; 并联校正——校正装置Gc(s)与原系统中部分环节形成一个局部反馈回路,又称反馈校正,如图b所示
系统的校正方式 对控制系统进行校正时,选用何种校正方式决定于具体情况,如系统中信号的性质和功率、供选用的元件、经济条件以及设计者的经验等。一般来说,串联校正比反馈校正要简单些,但串联校正常需要对信号进行隔离和提高增益,系统中其他元件参数的变化将会影响校正效果。通常串联校正时校正装置配置在前向通路中能量最低的位置上。采用反馈校正且当信号适当时,所需的元件比串联校正时要少些。另外,反馈校正的结果将使系统对被反馈包围元件的参数变化不敏感,因此可以降低对这一部分元件的要求。但反馈校正装置本身的要求是比较高的 |

常用的校正装置
|
常用的校正装置 |
||||
|---|---|---|---|---|
|
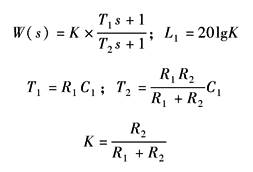
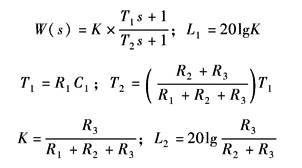
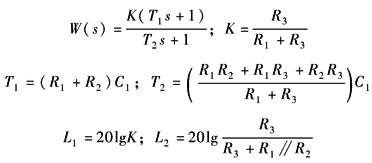
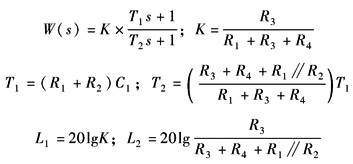
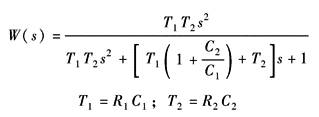
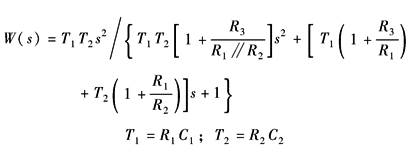
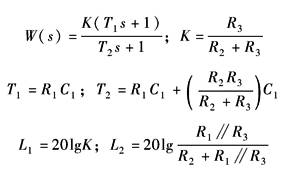
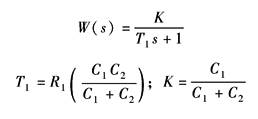
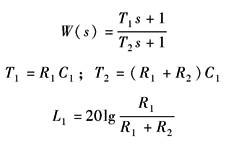
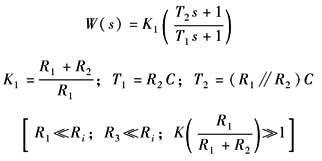
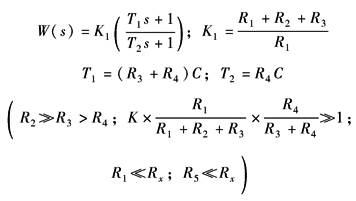
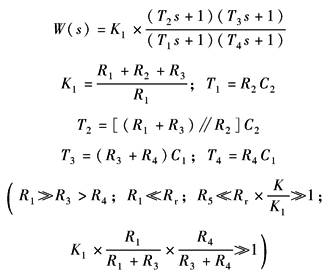
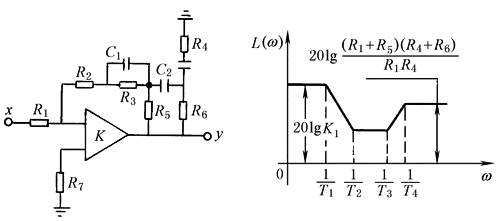
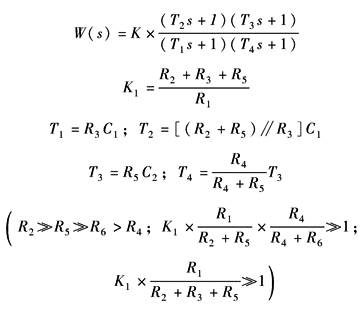
(1)校正装置 校正装置的形式很多,从物理结构上分,有电气的、机械的、液压的、气动的或者是它们的混合结构;就特性分,有滞后校正、超前校正和滞后-超前校正。一般来说,电气校正装置传输简单、精度高和可靠性大,所以在工程实际中应用较为广泛。在电气校正装置中,最常用的是由阻容元件组成的无源校正网络及用运算放大器和RC网络构成的各种调节器。其中PID调节器是控制工程中应用最为广泛的调节器,近年来数字PID控制得到了迅速发展 各类无源校正网络和调节器如表1所示 |
||||
|
表1 无源校正网络和调节器 |
||||
|
电路及特性 |
传递函数及参数 |
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
(2)串联校正中几种校正装置的比较 在串联校正方式中常采用超前、滞后或滞后-超前校正装置,各类校正装置适用场合和校正效果比较如下 ① 超前校正是通过相位超前的效果来改善系统的品质。校正后系统的相位裕量和频带宽都会增大,因此能有效地改善系统的动态品质,但对系统的稳态精确度影响不大。超前校正适用于稳态精度已满足但动态品质不满足要求的系统 ② 滞后校正是通过高频衰减的特性来改善系统的品质。校正后系统稳态精确度可以提高,但滞后校正将使系统的频带宽减小,响应速度变慢。滞后校正主要适用于动态品质已满足要求,而希望改善稳态精度的系统 ③ 当系统需要同时改善动态品质和稳态精度时,宜采用滞后-超前校正 (3)反馈校正局部反馈校正的主要方法和校正效果如表2所示 |
||||
|
表2 反馈校正的方法及效果 |
||||
|
方 法 |
方 块 图 |
等效传递函数 |
效 果 |
|
|
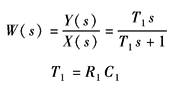
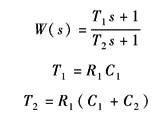
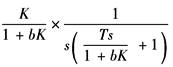
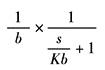
用比例反馈包围惯性环节 |
|
|
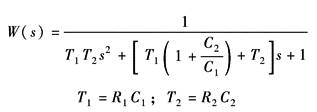
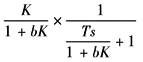
时间常数和放大系数都降低了 减小时间常数,提高相位裕量、增加带宽、改善系统的稳定性和提高系统的快速性 |
|
|
用微分反馈包围某环节,测速电机作反馈装置 |
|
|
有效地减小环节的时间常数 |
|
|
用比例包围积分环节 |
|
|
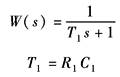
积分环节变为惯性环节 深反馈时(b很大),系统时间常数将减小,能改善稳定性 |
|
|
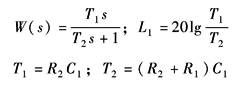
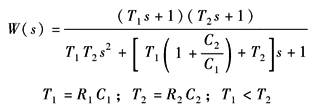
用惯性包围放大器 |
|
|
原放大器变为一个微分装置 在系统中起相位超前的调节器作用 |
|