控制系统的误差分析
控制系统的误差分析
误差和误差传递函数
|
误差和误差传递函数 |
|
|---|---|
|
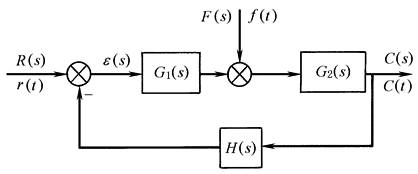
控制系统的精确度是用系统的误差来衡量的。因此,系统的稳态误差是系统的重要性能指标之一 对于下图所示的反馈控制系统,其误差、误差传递函数和稳态误差等概念可定义如下 (1)误差 系统的期望输出量c*(t)和实际输出量c(t)之差,即 |
|
|
或 若系统为单位反馈系统,H(s)=1,则
若系统为非单位反馈系统,H(s)≠1,则
因此,对于单位反馈系统:
|
反馈控制系统 |
|
(2)误差传递函数 ① 控制作用下的误差传递函数[F(s)=0]
对于单位反馈系统
② 干扰作用下的误差传递函数[R(s)=0]
(3)稳态误差 控制系统误差函数e(t)的稳态分量,记为e(∞):
当控制和干扰作用同时存在时,系统的误差函数e(t)为
|
|




稳态误差的计算
|
稳态误差的计算 |
||||||
|---|---|---|---|---|---|---|
|
(1)任意输入信号作用下的稳态误差计算 设系统在控制输入r(t)和干扰输入f(t)共用之下,则
则系统的稳态误差e(∞)为
式中
r(i)(∞)——输入函数的i阶导数在t=∞时的值, f(j)(∞)——干扰作用函数的j阶导数在t=∞时的值,
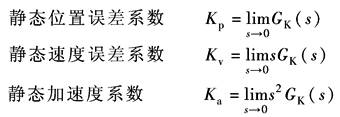
(2)典型控制输入作用下稳态误差的计算 典型输入作用下系统的稳态误差计算。可以根据系统的类型和系统的开环增益K以及相应的静态误差系数来计算。基本原理是利用拉氏变换的终值定理,即
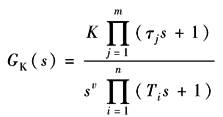
① 系数的类型 设反馈控制系统开环传递函数形式如下:
其中,υ为开环传递函数中所包含的积分环节个数,称为系统的无差度。无差度可以用来对系统进行分类: υ=0,称为0型系统 υ=1,称为Ⅰ型系统 υ=2,称为Ⅱ型系统 υ=3,称为Ⅲ型系统 实际系统中,υ越大对系统的稳定性越不利,因此实际系统大都要求υ≤2 ②静态误差系数
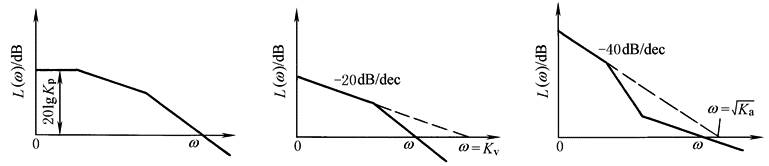
静态误差系数可以根据系统的开环对数幅频特性的低频特性来确定,如下图所示
根据开环对数幅频特性确定误差系数 典型控制输入作用下系统稳态误差e(∞)的计算如下表所示 |
||||||
|
典型控制输入作用下的稳态误差 |
||||||
|
系统型别 |
静态误差系数 |
阶跃输入r(t)=R |
斜坡输入r(t)=Rt |
加速度输入 |
||
|
υ |
Kp |
Kv |
Ka |
|
|
|
|
0 |
K |
0 |
0 |
|
∞ |
∞ |
|
1 |
∞ |
K |
0 |
0 |
|
∞ |
|
2 |
∞ |
∞ |
K |
0 |
0 |
|












改善系统稳态品质的主要方法
|
改善系统稳态品质的主要方法 |
|---|
|
① 尽可能确保系统中的元件,特别是反馈检测元件的精度和稳定性 ② 提高系统的开环增益和增大扰动作用点以前的前向通路中传递函数的放大倍数 ③ 增加前向通路中积分环节的个数或扰动作用点以前积分环节的个数 ④ 采用复合控制以降低系统误差和改善系统的动态品质,有关复合控制可参阅专门文献 应当注意,提高开环增益和增加前向通路中积分环节的个数有可能使系统的稳定性变坏 |


