APC系统的数学模型
APC系统的数学模型
|
APC系统的数学模型 |
||
|---|---|---|
|
项目 |
内容 |
|
|
方 块 图 |
由于APC系统采用工业控制数字计算机或数字控制器,因此它是一个离散控制系统,方块图如下:
图中 Xp——压下缸活塞位移,被控制量 R——AGC控制器发出的指令。当对APC系统进行测试时,R为阶跃或正弦试验信号,因此须通过采样器将其离散化
离散的数字信号传递给CPU Y——由检测环节输出的位置反馈信号。信号的型式取决于传感器类型 D——工业控制计算机或数字控制器。可令D=K1,K1——增益调整系数 D/A——数模转换器,它把离散数字信号转换成离散模拟信号。其转换精度取决于位数大小。由于D/A和A/D只影响转换精度而不会影响系统的基本性能,所以方块图中可以省略 |
|
|
各 环 节 传 递 函 数 |
零阶保持器 |
由于零阶保持器简单,相位滞后小,一般都采用零阶保持器,其传递函数Gh(s)把离散的模拟信号近似恢复成连续的模拟信号
|
|
位移传感器及其二次仪表 |
由于压下系统中均需选用高精度、高响应的位置传感器及其配套二次仪表,因此:
Wf(s)——位移传感器及其二次仪表传递函数 对于LVDT或电感式位移传感器及其二次仪表,它是以电压输出的连续模拟信号,须经采样器变成离散模拟信号,再经A/D转换成离散数字信号。对于磁尺及其检测器(二次仪表),它输出的是脉冲宽度为微米级的脉冲,需经高速计数器计数。对于磁致伸缩式位移传感器,它有模拟式和数字式两种可供选择,数字式中又有SSI和CANBUS两种接口板 Kf——检测环节增益,本例中Kf=156.25V·m-1 |
|
|
放大器 |
考虑到伺服放大器频宽比伺服阀高得多,于是:
Wa(s)——伺服放大器传递函数 Ki——放大器(PID)的比例增益,Ki=4~100mA·V-1可调 调定Ki=15mA·V-1 |
|
|
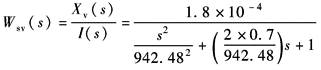
伺服阀 |
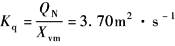
Wsv(s)——伺服阀的传递函数 Ksv——伺服阀的增益,以电流IN为输入、以主阀芯位移Xv为输出时
ωsv——伺服阀的频宽,rad·s-1 ζsv——伺服阀的阻尼系数 根据伺服阀频宽特性可知
伺服阀的流量增益 以流量为输出时,伺服阀的总增益K'sv=KsvKq=6.67×10-4m3·(s·mA)-1 |
|
|
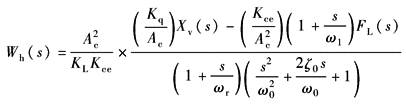
动力元件 |
Wh(s)——动力元件,即压下缸及其负载的传递函数 严格地讲,APC系统动力元件属于多自由度动态系统。由于轧件的变形抗力系数,KL=K(K为轧机自然刚度),作为工程分析,可将其看做是单自由动态系统。并可直接引用表 阀控动力元件与负载特性的匹配及表 三通阀控制不对称缸的动态特性中的分析结论,直接写出带有弹性负载KL时的传递函数
式中
ω0——综合谐振频率,rad·s-1
ζ0——阻尼系数
ωr——综合刚度引起的转折频率,rad·s-1
Kh——液压弹簧刚度,N·m-1 KL——弹性负载刚度,N·m-1 由于
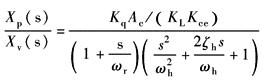
则以Xv为输入,以Xp为输出时,传递函数为
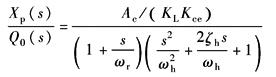
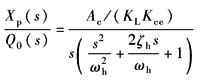
而以Q0为输入,以Xp为输出时的传递函数为
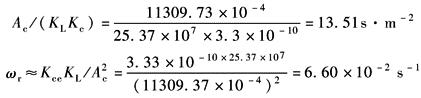
压下缸内泄漏极其微小,于是Kce=Kc,阀在工作点处的流量-压力系数Kc可从其静态特性中估计出来
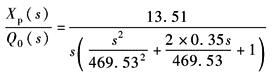
取KL=25.37×107N·m-1,则
因ωr=ωh,故可将
APC系统动力元件属于多自由度动态系统。由于轧件的变形抗力系数KL=K(K为轧机自然刚度),APC系统工作时,伺服阀不可能在零位,总是在零位附近调节,一旦偏离零位,则阻尼便迅速增大,可取ζh=0.3~0.35。于是
|
|
|
最 终 方 块 图 |
综上可得以AGC指令R为输入,以Xp为输出的APC系统闭环状态方块图:
|
|