Z变换
Z变换
Z变换定义
|
Z变换定义 |
||
|---|---|---|
|
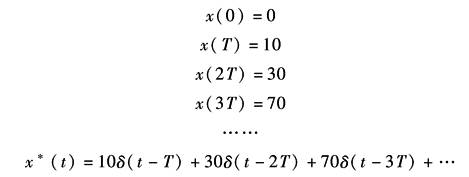
Z变换是研究离散系统的一种有力工具,利用它可将线性差分方程变换成线性代数方程 设离散信号x*(t)为
则其拉氏变换式为
令 则 式中,X(z)称为x*(t)的Z变换,并以Z[x*(t)]表示,即
X(z)有时也习惯性地称作x(t)的Z变换式,即
而其实际含义仍是指x(t)经采样后,对x*(t)的Z变换 Z变换式的求取方法有两种,即根据连续信号x(t)求X(z)或根据x(t)的象函数X(s)求取相应的Z变换式,后者称为部分分式法。部分分式的原理是:设X(s)具有以下形式
式中 k——X(s)中的极点数; Ai——对应于每一个极点的常数; si——X(s)的极点 则X(s)的原函数x(t)为
利用基本函数的Z变换表,可得与x(t)相对应Z变换式
基本函数的Z变换如下表所示 |
||
|
Z变换表 |
||
|
X(s) |
x(t)或x(k) |
X(z) |
|
1 |
δ(t) |
1 |
|
e-kTs |
δ(t-kT) |
z-k |
|
|
1(t) |
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e-αt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
te-αt |
|
|
|
sinωt |
|
|
|
cosωt |
|
|
|
e-αtsinωt |
|
|
|
e-αtcosωt |
|
|
|
sinhαt |
|
|
|
coshαt |
|
|
|
αk |
|
|
|
αkcoskπ |
|
|
|
|
|
|
例 已知 因为 查上表,可得
因此 |
||
































Z变换的基本性质
|
Z变换的性质 |
|
|---|---|
|
x(t)或x(k) |
Z[x(t)]或Z[x(k)] |
|
αx(t) |
αX(z) |
|
xi(t)+x2(t) |
X1(z)+X2(z) |
|
x(t+T)或x(k+1) |
zX(z)-zx(0) |
|
x(t+2T) |
z2X(z)-z2x(0)-zx(T) |
|
x(k+2) |
z2X(z)-z2x(0)-zx(1) |
|
x(t+kT) |
xkX(z)-zkx(0)-zk-1x(T)-…-zx(kT-T) |
|
x(k+m) |
zmX(z)-zmx(0)-zm-1x(1)…-zx(m-1) |
|
tx(t) |
|
|
kx(k) |
|
|
e-αtx(t) |
X(zeαT) |
|
e-αkx(k) |
X(zeα) |
|
αkx(k) |
|
|
kαkx(k) |
|
|
x(0) |
|
|
x(∞) |
|
|
|
X(1) |
|
|
X(z)Y(z) |






Z反变换
|
Z反变换 |
|---|
|
Z反变换是根据X(z)求出原函数x*(t)和x(nT)。常用Z反变换的方法有以下两种 ① 幂级数法。幂级数法是利用长除把X(z)展开成z-i的幂级数式,然后根据Z变换的定义式求出x*(t)或x(nT)。例如
因此
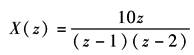
这种方法有时不便于求取x(nT)的闭式结果 ② 部分分式法。这是一种常用方法,它将X(z)分解成为部分分式,然后利用Z变换表求取x*(t)或x(nT),例如
展开成部分分式
查表Z变换定义中表可得
因此 |


用Z变换求解差分方程
|
用Z变换求解差分方程 |
|---|
|
用Z变换求解差分方程与用拉普拉斯变换解微分方程一样,是非常有用的,其实质是利用Z变换将差分方程转化为代数方程。由Z变换的性质知,x[(n+m)T]的Z变换式为
式中,x(0),x(1),…是x(t)在不同时刻的采样值。利用上述关系就可以将差分方程转化为以z为变量的代数方程,并自动包含了初始采样值。例如差分方程
方程两端Z变换后得
代之初始数据并整理之
利用Z变换表可得
因此X(z)的原函数x(kT)为
各时刻的函数值为
|