电液力(压力)伺服系统的分析与设计
电液力伺服系统的类型及特点
|
电液力伺服系统的类型及特点 |
||
|---|---|---|
|
如果说电液速度伺服系统可能受到电气控制系统的挑战,电液力伺服系统却是独树一帜,因为用液压缸对受控对象进行加载极为简便,且出力大、尺寸小、响应快、精度高。电液力(压力)伺服系统广泛应用于材料试验机、大型构件试验机、航空或高速汽车轮胎试验机、负载模拟器、飞机防滑车轮刹车系统、带材张力调节系统、平整机恒压系统和水压试管机压力控制等方面 |
||
|
类型 |
驱动力伺服系统 |
负载力伺服系统 |
|
系统 组成 |
|
|
|
特点 |
力传感器装在施力缸活塞与被控制对象之间,检测到的力包括惯性力、黏性阻尼力和弹性力;因此检测和控制的是施力缸的驱动力 |
力传感器装在被控制对象与基座之间,检测和控制的仅是弹性负载力 |
电液驱动力伺服系统的分析与设计
采用Q阀的单自由度驱动力系统
|
采用Q阀的单自由度驱动力系统 |
|||
|---|---|---|---|
|
项目 |
分析 |
说明 |
|
|
动 态 方 程 |
|
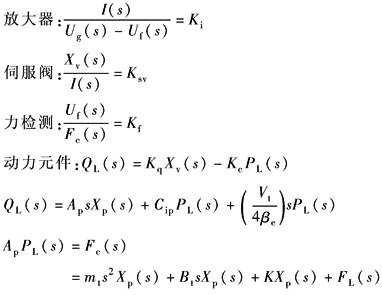
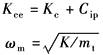
力传感器刚度Kf?K(负载刚度)时,可把力传感器看成刚性,系统看做是单自由度系统 Fc——力传感器的输出力,N Uf——力传感器二次仪表的输出,V Kf——力传感器及二次仪表的增益,V/N mt=mp+mL——总的运动质量,kg Bt=Bp+BL——总的黏性阻尼系数,N·s/m K——负载刚度,N/m |
|
|
方 块 图 |
|
||
|
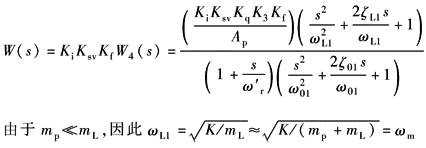
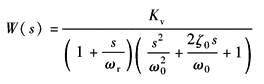
开 环 传 递 函 数 |
W(s)=KiKsvKfKqWl(s) 考虑到:Fc(s)=ApPL(s)
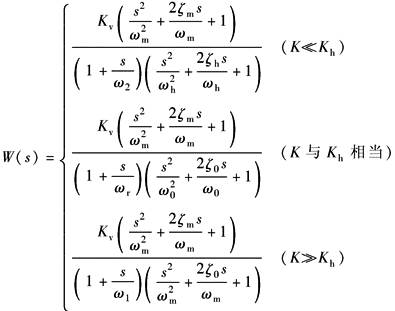
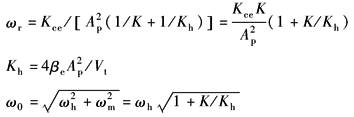
Kv=KiKsvApKfKq/Kce Kv——开环增益 |
ωm——机械谐振频率,rad/s
ζm——机械阻尼系数,无量纲
ωr——液压及机械弹簧引起的转折频率,rad/s
Kh——液压弹簧刚度,N/m
ω2——负载弹簧引起的转折频率,rad/s
ω1——液压弹簧引起的转折频率,即容积滞后频率,rad/s
ω0——综合谐振频率,rad/s
ωh——液压谐振频率,rad/s
ζ0——综合阻尼系数,无量纲
|
|
|
波 德 图 |
(a)K=Kh的情况 (b)K与Kh相当情况 (c)K?Kh的情况 |
结论: (1)驱动力系统属0型系统,对阶跃输入存在稳态误差 (2)负载刚度K愈小,系统稳定性愈差,甚至ωh处的谐振峰可能超出零分贝线,以致不稳定,如波德图a所示。在ωc与ωm之间加入Wc(S)=(1+s/ωc)-2的校正环节,可望改善稳定性,见a图中虚线。当然,仅当K变化不大时,校正才会奏效 (3)在相同的开环增益下,K愈小,ωc愈低,即响应速度愈低。因此系统稳定性和响应均应按K最小值来检验 (4)对于实际的驱动力系统,不仅要充分考虑K变化对系统性能的影响,还应计及伺服阀等小参数的影响 (5)若要分析外负载力FL对输出力Fc的影响,还应进行类似的分析 |
|







采用Q阀的两自由度驱动力系统
|
采用Q阀的两自由度驱动力系统 |
|||
|---|---|---|---|
|
项目 |
分析 |
说明 |
|
|
物 理 模 型 及 动 态 方 程 |
与单自由度系统相比,仅力平衡方程不同:
|
|
KF——力传感器刚度,N/m |
|
方 块 图 及 其 简 化 |
|
||
|
开 环 传 递 函 数 及 分 析 |
图b中W2(s)相当于不存在弹性负载的阀控缸以Xv为输入,以Xp为输出的传递函数,可直接引用表传递函数及其简化中K=0的结论:
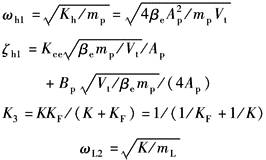
如ω02?ω01,则ω02所处的二阶环节可略去,此时
|
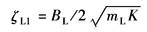
ωL2——负载谐振频率
ζL1——负载阻尼比
ωL2——负载力及传感器的综合谐振频率
ζL2——综合阻尼比 ω'r、ω01、ω02、ζ01、ζ02——将W4(s)折成典型环节后的参数 结论: 两自由度系统的简化传递函数与单自由度系统型式相同,单自由度系统的有关结论原则上也适用于两自由度系统 |
|



采用P阀的单自由度驱动力系统
|
采用P阀的单自由度驱动力系统 |
||
|---|---|---|
|
项 目 |
分析 |
说明 |
|
动 态 方 程 |
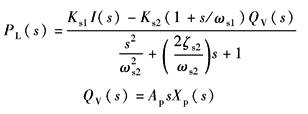
与采用Q阀的单自由度驱动力系统相比,仅伺服阀的传递函数不同。P阀的传递函数:
|
Ks1——P阀的压力增益,N/(m2·A) Ks2——P阀的流量—压力系数,N·s/m5 QV——使缸运动的强制流量,m3/s ωs1——P阀的一阶因子频率,rad/s ωs2——P阀的二阶因子频率,rad/s |
|
方 块 图 |
|
|
|
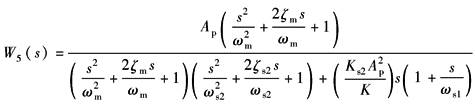
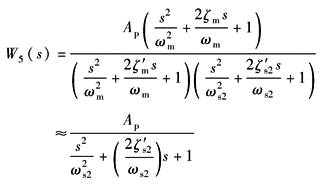
传 递 函 数 |
图中:
W5(s)的分母为四阶,一、二项Ks2A2ps(1+s/ωs1)/K不会影响高阶项,因此W5(s)可写成如下形式:
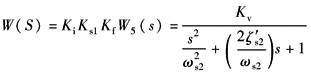
于是开环传递函数:
Kv=KiKs1ApKf Kv——开环增益,V/V |
K——负载刚度,N/m 结论: (1)采用P阀时,系统开环传递函数不存在采用Q阀时的二阶微分环节,也就是说采用P阀的驱动力系统的稳定性比Q阀时好得多 (2)如P阀的频宽很高,可近似看做比例环节 (3)采用P阀时,可以采用PI放大器 |


电液负载力伺服系统的分析与设计
采用Q阀的单自由度负载力系统
|
采用Q阀的单自由度负载力系统 |
||
|---|---|---|
|
项目 |
分析 |
说明 |
|
动 态 方 程 |
与驱动力系统相比,仅力平衡方程有所不同:
|
参见表电液力伺服系统的类型及特点中系统原理图 |
|
方 块 图 |
|
|
|
传 递 函 数 |
图中W6(s)系以Xv(s)为输入,Xp(s)为输出的具有弹簧负载的阀控动力元件的传递函数。可直接引用表传递函数及其简化中结果,即
图中 W7(s)=BLs+K=K(1+1/ωb) 于是开环传递函数
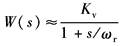
Kv=KiKsvKqApKf/Kce Kv——开环增益 考虑到
于是W(s)可以简化成
如果ω0?ωr,则
|
ζ0见表 采用Q阀的单自由度驱动力系统 ωb=K/BL 结论: (1)采用Q阀的负载力系统,不易出现采用Q阀的驱动力系统那样的严重稳定性问题 (2)可以采用PI放大器,使0型系统变成Ⅰ型系统 |


采用P阀的单自由度负载力系统
|
采用P阀的单自由度负载力系统 |
||
|---|---|---|
|
项 目 |
分析 |
说明 |
|
动 态 方 程 |
为说明本质问题,设P阀的频宽很高,其传递函数可简化为
|
Ks1——P阀的压力增益,N/(m2·A) Ks2——P阀的流量-压力系数,N·s/m5 |
|
方 块 图 |
|
|
|
传 递 函 数 |
图中:
于是系统开环传递函数
K'v=KiKs1ApKf K'v——开环增益,V/V |
ωm——机械谐振频率,rad/s
ζm——机械阻尼系数 结论: (1)采用P阀的负载力系统,亦为0型系统 (2)对于负载力系统,看不出采用P阀有什么更为显著的好处 |