液压动力元件的动态特性
液压动力元件的动态特性
对称四通阀控制对称缸的动态特性
动态特性方程及方块图
|
动态特性方程及方块图 |
|||
|---|---|---|---|
|
项目 |
简图及特性方程 |
说明 |
|
|
物 理 模 型 |
|
模型中滑阀为正开口阀,并假定: (1)供油压力ps恒定,回油压力pr=0; (2)阀的四个节流窗口配作且对称,采用矩形阀口,阀口处流动为紊流; (3)不考虑管道损失及管道的动态; (4)温度和密度均为常数 滑阀为理想零开口阀时,Q3=Q4=0 QL=(Qip+Qop)/2 Qip=(Q1-Q4),为进入缸的流量 Qop=(Q2-Q3),为从缸流出的流量,m3/s s——拉普拉斯算子,1/s Kq,Kc——工作点处的流量增益、流量-压力系数,见表 流量增益、流量-压力系数汇总 xv——滑阀的位移,m xp,Ap——活塞位移、活塞工作面积,单位分别为m,m2 pL=(p1-p2),为负载压力,N/m2 |
|
|
动 态 方 程 |
滑阀的流量方程 |
QL(s)=Kqxv(s)-KcpL(s) |
|
|
活塞腔的连续性方程 |
QL(s)=Apsxp(s)+CtppL(s)+(υt/4βe)spL(s) |
||
|
活塞上的力平衡方程 |
AppL(s)=mts2xp(s)+Bpsxp(s)+Kxp(s)+FL(s) |
||
|
方 块 图 |
p1,p2——缸两腔压力,N/m2 Vt——总容积,Vt=(V1+V2),V1,V2为进油腔、回油腔容积,m3 Ctp——缸的总泄漏系数,Ctp=(Cip+Cep/2),m5/N·s Cip,Cep——缸的内、外泄漏系数,m5/N·s βe——液体的有效容积弹性模数,N/m2 mt——活塞、油液及负载等效到活塞上的总质量,kg Bp——活塞及负载的黏性阻尼系数,N·s/m K——负载的弹簧刚度,N/m KL——作用在活塞上的外负载力,N |
||
流量增益、流量-压力系数汇总
|
流量增益、流量-压力系数汇总 |
||
|---|---|---|
|
工作点 |
理想零开口四通阀 |
正开口四通阀 |
|
平衡点: xv=xv0 pL=pL0 QL=QL0 |
|
|
|
零点: xv=0 pL=0 QL=0 |
|
|
传递函数及其简化
|
传递函数及其简化 |
|||||
|---|---|---|---|---|---|
|
|
考虑因素 |
简化条件 |
简化后的传递函数 |
动态参数 |
|
|
1 |
质量mt 阻尼Bp 刚度K 压缩性βe 缸泄漏Ctp |
|
K任意 |
|
|
|
K=Kh |
|
||||
|
K?Kh |
|
||||
|
2 |
质量mt 阻尼Bp 压缩性βe 缸泄漏Ctp |
|
|
||
|
3 |
质量mt 阻尼Bp 缸泄漏Ctp |
|
|
||
|
4 |
刚度K 阻尼Bp 缸泄漏Ctp |
|
|
||
|
5 |
空载 |
|
|
||





指令输入下的频率特性及波德图
|
指令输入下的频率特性及波德图 |
||||
|---|---|---|---|---|
|
输出/ 输入 |
负载 情况 |
传递函数及动态参数 |
波德图 |
|
|
|
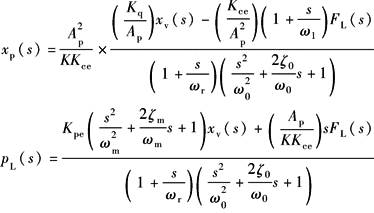
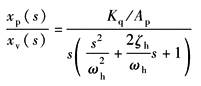
K=0 |
系统为Ⅰ型系统 动态参数: (1)速度增益Kq/Ap; (2)液压谐振频率 (3)液压阻尼系数ζh,见表传递函数及其简化 |
图中 L(ω)——幅频特性 φ(ω)——相频特性 ωc——穿越频率,ωc=Kq/Ap |
|
|
动态 特性 分析 |
动态特性由动态参数Kq/Ap、ωh、ζh所确定: (1)速度增益增大,则L(ω)上移、ωc增大。意味着系统精度、响应速度提高,但稳定性变差;注意:Kq随工作点变化,零位空载时Kq最大,稳定性最差 (2)ωh表征系统响应速度,是系统的极限频率,为提高ωh应增大Ap、βe而减小υt、mt。通常取βe=700MPa;注意:空气混入系统或采用软管时,βe大为降低 (3)ζh表征系统的相对稳定性,ζh主要取决于Kc。xv→0时,Kc、ζh值最小,ζhmin=0.1~0.2 |
|||
|
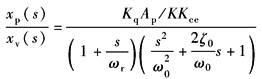
K≠0 |
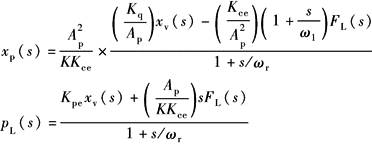
系统为0型系统,动态参数: (1)位置增量KqAp/KKce; (2)转折频率 (3)综合固有频率 (4)综合阻尼系数ζ0见表传递函数及其简化 |
图中 穿越频率 |
||
|
动态 特性 分析 |
K≠0时,系统变成0型系统。动态特性由动态参数增益、ωr、ω0、ζ0所确定 (1)动态参数均与负载刚度K有关:K增大时,增益、ωc及ζ0减小,而ωr、ω0提高,即稳态误差增大、快速性降低、超调变小 (2)注意:当K由某值变成0,即由有弹性负载转入空载时,增益由KqAp/KKce增加到Kq/Ap。瞬间增益的提高,有可能使原来稳定的系统变得不稳定。如果存在这种情况,应采取变增益控制措施 |
|||
|
|
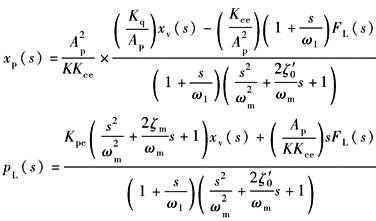
K=0 |
系统为0型系统,动态参数: (1)速度增益Kq/Ap; (2)液压谐振频率ωh; (3)液压阻尼系数ζh |
图中 虚线系加PI校正后的波德图 |
|
|
动态 特性 分析 |
(1)未加PI校正时,穿越频率ωc处的斜率为-40dB/dec,因ζh很小,因此相角储备r(ωc)很小;计及检测及伺服阀等环节造成的相位滞后以后,即使开环增益很小,闭环也可能不稳定;因此速度伺服阀系统须加PI校正 (2)采用PI校正后,穿越频率ω'c大为降低,即动态响应降低了 |
|||
|
|
K与Kh 相当 |
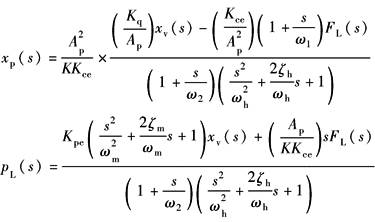
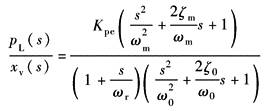
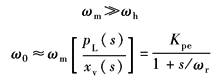
系统为0型系统 动态参数: (1)增益Kpe=Kq/Kce; (2)转折频率ωr; (3)综合固有频率ω0及阻尼ζ0; (4)机械固有频率ωm及阻尼ζm
|
|
|
|
K?Kh |
|
|||
|
K=Kh (常见) |
|
|||
|
动态 特性 分析 |
以pL输出时为压力控制;以驱动力Fg=pLAp输出时为力控制,有 (1)存在阻尼很小的二阶微分环节,且恒有ωm<ω0,ωm=ω0的点称为逆共振点,它是一个间断点;ωm是力控制系统频宽的极限值;ω>ωm易出现自激振荡,为不可用域 (2)为提高系统频宽,应设法增大ωc,为此应增大Kq、减小Ap;力及压力系统中,在保证驱动力的前提下,通过减小Ap来提高系统频宽,这一点是与位置及速度控制中不同的 |
|||







负载扰动下的频率特性及分析
|
负载扰动下的频率特性及分析 |
||||
|---|---|---|---|---|
|
输出/ 输入 |
负载 情况 |
传递函数 |
频率特性 |
动态特性分析 |
|
|
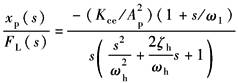
K≠0 |
|
(动态位置柔度特性) |
与分析xv作用下的频率特性一样,原则上可对FL作用下的频率特性进行类似的分析 在FL作用下,更关心的是: (1)动态位置刚度特性 (2)动态速降特性 |
|
K=0 |
|
|||
|
|
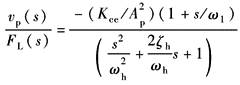
K=0 |
|
(动态速度柔度特性) |
|
|
|
K≠0 |
|
|
|
|
K=0 |
|
|||
|
|
K=0 |
|
|
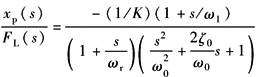
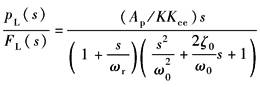
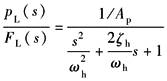
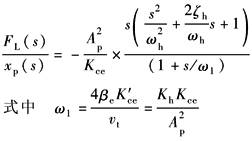
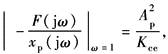
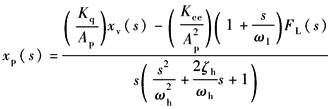
动态位置刚度特性的物理解释如下 (1)ω<ω1的低频段:渐进线斜率为+20dB/dec,当ω=1时, 速度刚度,说明低频时阀控缸相当于一个 阻尼系数为 作用相当于泄漏流量通道所造成的结果 (2)ω1<ω<ωh的中频段:渐进线斜率为0,由于外负载力的变化频率高,没有足够的时间让泄漏流量通过,油液被封在缸的两腔,因而动态刚度等于Kh (3)ω>ωh的高频段,渐进线斜率为+40dB/dec,由于FL的变化频率极高,快速“退让”运动产生很大的惯性力,抵消了FL的作用,因而动态刚度呈二次幂增加 (4)ω=0的刚度为稳态位置刚度,其值为 用下泄漏,使活塞不断后退,因而稳态位置刚度为零 |
|
|
K=0 |
|
|
(1)ω=0时的稳态速度刚度:
(2)反之,稳态速度柔度:
外负载力要引起速降 由于Kce很小,稳态速度柔度很小,这正是液压伺服系统的特点,是液压伺服系统得到广泛应用 |