液压动力元件的动态特性
泵控马达的动态特性
|
泵控马达的动态特性 |
|||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
|
表1 |
|||||||||||
|
类型 |
物理模型 |
说明 |
|||||||||
|
泵控缸 |
|
主回路:泵控缸 辅助回路有: (1)阀控变量机构; (2)补油冷却回路; (3)安全保护回路; (4)低压放油回路 |
|||||||||
|
泵控马达 |
变量泵-定量马达 |
|
主回路:泵控马达 辅助回路:略 Φp不变——定量泵 Φm不变——定量马达 |
||||||||
|
定量泵-变量马达 |
|||||||||||
|
变量泵-变量马达 |
|||||||||||
|
(1)变量泵-定量马达(缸)的动态特性 |
|||||||||||
|
表2 |
|||||||||||
|
项目 |
图或公式 |
说明 |
|||||||||
|
物理 模型 |
见表1 |
(1)忽略泵马达间管道的压力损失及动态 (2)泵、马达的泄漏为层流泄漏 (3)泵的转速np恒定 (4)低压补油系统压力pr恒定,只有高压侧压力随负载变化 (5)不考虑马达摩擦力矩等非线性因素 |
|||||||||
|
动 态 方 程 |
泵的流量方程 |
|
Qp——泵的输出流量,m3/s Dp——泵的排量,m3/rad;Dp=KdpΦp Kdp——泵的排量梯度,m3/rad2 Φp——泵的偏角,rad p1——出油(高压)侧压力,N/m2 Cip,Cep——泵的内、外泄漏系数,m5/(N·s) Ctp=Cip+Cep,为泵的总泄漏系数,m5/(N·s) Dm——马达的排量,m3/rad θm——马达轴转角,rad Cim,Cem——马达内、外泄漏系数,m5/(N·s) V0——高压腔总容积,m3 Ctm=Cim+Cem,为马达总的泄漏系数,m5/(N·s) Ct=Ctp+Ctm,为系统的总泄漏系数,m5/(N·s) Jt——马达及负载的总转动惯性,N·m·s2/rad Bm——马达及负载的总黏性阻尼系数N·m·s/rad G——负载的扭簧刚度,N·m/rad TL——外负载力矩,N·m |
||||||||
|
高压腔的连续性方程 |
|
||||||||||
|
马达轴的力矩平衡方程 |
|
||||||||||
|
方块图 |
与阀控马达、阀控缸的动态方程及方块图形式相同,仅参数不同:Φp→xv,Kdpnp→Kq,Ct→Kce |
||||||||||
|
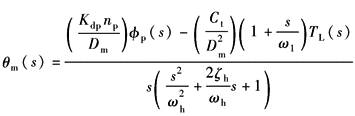
传递函数 (G=0) |
|
|
|||||||||
|
频率响应及动态参数分析 |
与阀控马达、阀控缸的频率特性型式相同,但动态参数值及其变化范围却有很大不同 |
||||||||||
|
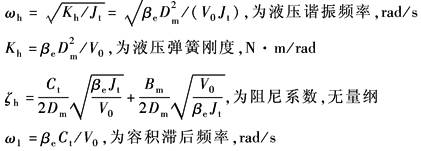
液压谐振频率 |
泵控马达只高压腔一侧受控,液压弹簧刚度仅为阀控马达的一半,故液压谐振频率为阀控马达的1/ |
||||||||||
|
液压阻尼系数 |
泵控马达的ζh较小且恒定,而且总是欠阻尼。所以为使系统获得所需的合适阻尼,往往在泵控马达的高低管道间有意地设置旁路泄漏通道或采用内部压力反馈。但这会降低压力增益、增大功率损耗,使泵的结构复杂 |
||||||||||
|
速度增益和稳态速度柔度 |
泵控马达的速度增益Kdpnp/Dm和静态速度柔度Ct/D2m都相当恒定;而阀控马达的速度增益与静态速度柔度变化较大 |
||||||||||
|
泵控马达与阀控马达的性能比较 |
(1)泵控马达的动态参数受工作点变化的影响小,动态特性更为确定,更可预知 (2)泵控马达的ωh值较小,若再计及泵的变量位置伺服部分的响应时间,因此总的响应速度比阀控马达低 (3)泵控马达的总泄漏系数小,稳态速度、刚度高,因而抗负载的刚度高。但由于泵控马达的ωh和ζh均较小,因而频率值在2ζhωh时动态刚度不如阀控马达高 (4)泵控马达的效率高,理论上可达100% |
||||||||||
|
(2)定量泵-变量马达的动态特性 |
|||||||||||
|
表3 |
|||||||||||
|
项目 |
图或公式 |
说明 |
|||||||||
|
物理模型 |
见表1中图b |
||||||||||
|
动 态 特 性 |
泵的流量方程 |
|
Dp=常数 |
||||||||
|
高压腔的连续性方程 |
|
Kdm——变量马达的排量梯度,m3/rad2 Φm——马达变量的偏角,rad |
|||||||||
|
马达轴的力矩平衡方程 |
|
KT=Kdmp10,为马达力矩系数,N·m/rad p10——高压腔压力的初始值,N/m2 Dm0=KdmΦm0,为马达的初始排量,m3/rad Φm0——马达初始偏角,rad |
|||||||||
|
方块图 |
与变量泵-定量马达相比,方块图中多了一个KT环节的并联通道 |
||||||||||
|
(3)变量泵-变量马达的动态特性 变量泵-变量马达实质上是变量泵-定量马达和定量泵-变量马达两种情况的组合 |
|||||||||||
|
表4 |
|||||||||||
|
方块图 |
说明 |
||||||||||
|
|
变量泵-定量马达与定量泵-变量马达方块图的合成 |
||||||||||