液压动力元件的动态特性
对称四通阀控制不对称缸分析
动态方程及压力跃变
|
动态方程及压力跃变 |
|||||||
|---|---|---|---|---|---|---|---|
|
项 目 |
内容 |
说明 |
|||||
|
物 理 模 型 |
(a)对称四通阀控制不对称缸简图 |
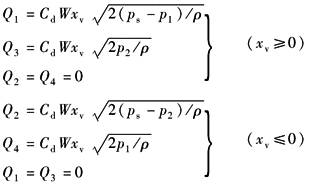
假设:缸为单活塞杆不对称缸,阀为对称的零开口四通阀 图中 A1,A2——无杆腔、有杆腔工作面积,m2 p1,p2——无杆腔、有杆腔工作压力,MPa ∑F——总负载,N
∑F1——xp>0时的总负载 ∑F2——xp<0时的总负载 FL,Fc——外负载力、摩擦力 Bp——黏性阻尼系数,N·s/m xv,xp——滑阀、活塞位移,m V1,V2——无杆腔、有杆腔容积,m3 Q1~Q4——通过阀口1~4的流量,m3/s |
|||||
|
动 态 方 程 |
阀 的 流 量 方 程 |
|
|||||
|
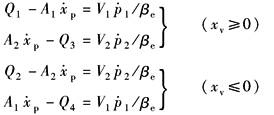
连 续 性 方 程 |
|
数字仿真:由于缸的不对称,难以获得系统的传递函数及频率特性,必须根据动态方程组,通过数字仿真求出系统的动态特性 |
|||||
|
活 塞 运 动 方 程 |
|
||||||
|
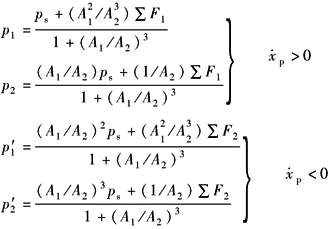
压 力 及 压 力 跃 变 |
有 负 载 时 |
|
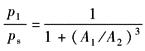
为简化分析,分析压力跃变时,未考虑油的压缩性和缸的泄漏情况 式中 p1,p2—— p'1,p'2—— Δp1,Δp2——V1,V2腔内的压力跃变值
|
||||
|
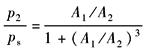
空
载
时 |
|
||||||
|
运动状况 |
压力关系 |
A1/A2=1 |
A1/A2=1.71 |
A1/A2=2 |
|||
|
|
|
0.500 |
0.167 |
0.111 |
|||
|
|
0.500 |
0.285 |
0.222 |
||||
|
|
|
0.500 |
0.487 |
0.444 |
|||
|
|
0.500 |
0.833 |
0.889 |
||||
|
|
Δp1=p1-p'1 |
0 |
0.320ps |
0.333ps |
|||
|
Δp2=p2-p'2 |
0 |
0.548ps |
0.667ps |
||||
|
结
论 |
(1)只要A1/A2≠1,即只要对称四通阀控制的是不对称缸,在运动的换向瞬间,即 (2)表中数据是假定空载且不考虑油液的压缩性条件下得到的,如考虑负载和油液的压缩性,则压力跃变值将大于表中的数值 (3)缸内工作压力的变化范围为0<p<ps,为留有安全裕量,要求(1/6)ps≤p≤(5/6)ps。但当A1/A2>1.71时,即使在空载条件下,缸内工作压力(p1或p2)也超出(1/6)ps≤p≤(5/6)ps的范围 (4)由于存在油液的压缩性,因此,在巨大的压力跃变下,必引起油液的“内爆”或“外爆”,由此即使在 (5)对于要求精确且平稳的控制场合,对称四通阀同不对称缸的不相容性是显然的,为了避免压力的跃变并确保能平稳地工作,必须采取有效的措施 (6)表中数据是假定∑F1=∑F2=0的空载情况下得到的。如果∑F1=∑F2为恒定载荷,将使p1、p2偏置一定值,但压力跃变的幅值不变。实际工作中载荷并非常量,压力的偏置值和压力跃变幅值都将随工况而变化,即随运动状态和负载而变化 |
||||||








解决对称四通阀与不对称缸不相容的方法
|
解决对称四通阀与不对称缸不相容的方法 |
||
|---|---|---|
|
方法名称 |
方法及原理 |
实质及特点 |
|
1.阀口面积补偿法 |
由表动态方程及压力跃变中图a,并令L1=L2=L/2,可导出平稳控制的条件:
式中,W1、W2、W3、W4分别为阀口1、2、3、4的面积梯度 |
实质是采用不对称阀,利用阀的面积梯度与活塞面积进行匹配、补偿 特点是必须采用非标准伺服阀,L1≠L2≠L/2时结果是近似的 |
|
2.非线性算法或电路补偿法 |
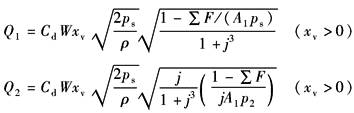
(1)由表动态方程及压力跃变中图a,不计油的压缩性及缸的泄漏,并令j=A2/A1,可导出补偿前流量公式:
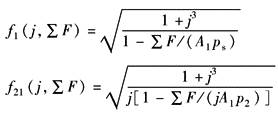
式中,xv=KxI,I为伺服阀的输入电流 (2)活塞杆上装一只拉压力传感器检测∑F (3)作两个非线性函数或电路
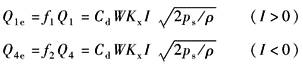
(4)按左图算法及接法,并加方向鉴别器,可得补偿后Q1、Q2的等效流量
|
非线性补偿的算法或电路接法 该补偿法的实质是通过算法或电路产生补偿电流,使阀产生补偿位移,以补偿面积差,该补偿法对活塞任意位置均适用,但因未计及油的压缩性,故属静态补偿 |